治學(xué)|喜訊,!佗道醫(yī)療研究成果發(fā)表在國際SCI期刊《Journal of Clinical Medicine》
近日,,由南京醫(yī)科大學(xué)第一附屬醫(yī)院(江蘇省人民醫(yī)院)、貴州省人民醫(yī)院,、華中科技大學(xué)同濟(jì)醫(yī)學(xué)院附屬普愛醫(yī)院(武漢市第四醫(yī)院)聯(lián)合佗道醫(yī)療科技有限公司(以下簡稱“佗道醫(yī)療”)共同研究的成果,,在國際SCI期刊《Journal of Clinical Medicine》發(fā)表。本次研究旨在開發(fā)一種新型的骨科手術(shù)機(jī)器人來輔助脊柱手術(shù),,并將其可行性和準(zhǔn)確性與現(xiàn)有的骨科機(jī)器人的進(jìn)行比較,。經(jīng)過臨床實(shí)驗(yàn)證明,該骨科手術(shù)機(jī)器人具有很高的精度,,同時(shí)優(yōu)化了臨床操作,,適用于臨床應(yīng)用,為骨科醫(yī)生持續(xù)賦能,,為智能骨科注入新力量,。
近年來,,由于多種脊柱病理,越來越多的患者需要進(jìn)行椎弓根螺釘固定,,而螺釘植入的準(zhǔn)確性至關(guān)重要,。手術(shù)機(jī)器人作為一種輔助醫(yī)療器械,可以提高手術(shù)的準(zhǔn)確性和安全性,,越來越受到醫(yī)生的青睞,。機(jī)器人輔助脊柱手術(shù)也已應(yīng)用于臨床實(shí)踐中。它在安全性,、準(zhǔn)確性,、對外科醫(yī)生的輻射量和學(xué)習(xí)曲線等方面都已被證實(shí)優(yōu)于手工手術(shù)。目前,,世界上已經(jīng)開發(fā)了許多脊柱手術(shù)機(jī)器人,如MazorX,,ROSA和Excelsius GPS?,F(xiàn)有骨科手術(shù)機(jī)器人都由類似的組成結(jié)構(gòu),有一個(gè)具有跟蹤能力的機(jī)械臂,,可與術(shù)中三維影像導(dǎo)航系統(tǒng)相結(jié)合,。在獲取圖像并規(guī)劃所需的螺釘軌跡后,機(jī)械臂可運(yùn)動(dòng)至規(guī)劃位置,,為醫(yī)生指明螺釘?shù)奈恢煤头较?,之后由醫(yī)生手動(dòng)進(jìn)行鉆孔和螺釘植入。然而,,現(xiàn)有骨科手術(shù)機(jī)器人也有一些缺點(diǎn),,包括由其跟蹤器造成的創(chuàng)傷,以及略微復(fù)雜的操作程序,。因此,,我們的團(tuán)隊(duì)獨(dú)立開發(fā)了一種新型的骨科機(jī)器人(佗手,佗道醫(yī)療科技有限公司,,南京,,中國)來應(yīng)對現(xiàn)有機(jī)器人面臨的挑戰(zhàn)。
臨床驗(yàn)證模塊
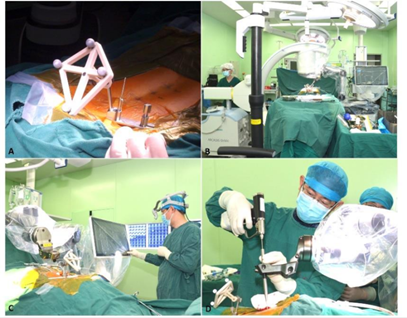
佗手骨科手術(shù)機(jī)器人與現(xiàn)有骨科手術(shù)機(jī)器人進(jìn)行了多中心隨機(jī)對照試驗(yàn),,對照試驗(yàn)的主要目的是研究兩種機(jī)器人在椎弓根螺釘固定過程中克氏針放置準(zhǔn)確性的差異,,其他的準(zhǔn)確性和安全性指標(biāo)也進(jìn)行了比較。實(shí)驗(yàn)中佗手骨科手術(shù)機(jī)器人為實(shí)驗(yàn)組,,現(xiàn)有骨科手術(shù)機(jī)器人為對照組,。結(jié)果是實(shí)驗(yàn)組在克氏針置入位置的準(zhǔn)確性方面優(yōu)于對照組,同時(shí)其他實(shí)驗(yàn)指標(biāo)也能與對照組持平,。
實(shí)驗(yàn)對比發(fā)現(xiàn),,實(shí)驗(yàn)組克氏針放置的位置偏差明顯小于對照組,。在全分析集(即所有入組病例,包括合格病例和脫落病例)的情況下,,實(shí)驗(yàn)組的克氏針置入位置偏差較對照組降低了13.86%,;同時(shí),實(shí)驗(yàn)組的椎弓根螺釘置入準(zhǔn)確率為98%,,對照組為94%,。實(shí)驗(yàn)組的入點(diǎn)偏差明顯小于對照組,數(shù)據(jù)具有統(tǒng)計(jì)學(xué)差異,。
文章總結(jié)
通過此項(xiàng)研究,,我們發(fā)現(xiàn)佗手不僅在精度和安全性方面有優(yōu)良的表現(xiàn),同時(shí)佗手將機(jī)械臂與工作站相結(jié)合,,大大提高了手術(shù)效率和空間利用率,。操作人員可以隨時(shí)通過屏幕獲取機(jī)械臂和克氏針的位置誤差信息,提高了機(jī)器人的可操作性,。
其次,,佗手機(jī)械臂的末端進(jìn)行了改進(jìn),保證了手術(shù)定位的準(zhǔn)確性,。其他現(xiàn)有骨科機(jī)器人,,標(biāo)定器和導(dǎo)向筒通過拆裝機(jī)構(gòu)連接到末端。長時(shí)間的反復(fù)拆卸和組裝會(huì)導(dǎo)致物理磨損和安裝位置不一致,,導(dǎo)致精度的損失,。相反,佗手的末端采用了跟蹤器和導(dǎo)向筒的集成設(shè)計(jì),,避免了拆裝導(dǎo)致精度下降的風(fēng)險(xiǎn),。
佗手機(jī)器人的第三個(gè)優(yōu)勢是手術(shù)創(chuàng)傷更小。在對照組中,,需要將皮膚切開并將患者跟蹤器固定在棘突上,。有時(shí)是由于這個(gè)操作而導(dǎo)致手術(shù)所做的切口不小于螺釘放置的切口,這違背了微創(chuàng)手術(shù)的目的,。使用佗手的克氏針固定器,,可以在不做多余切口的情況下將患者跟蹤器牢固地固定在棘突上,大大減少了創(chuàng)傷,。
 掃一掃,,關(guān)注我們
掃一掃,,關(guān)注我們
 蘇公網(wǎng)安備 32011402011402號
蘇公網(wǎng)安備 32011402011402號佗道醫(yī)療科技有限公司 版權(quán)所有